 商城
商城 乐聚高动态仿人机器人一期成果论证会顺利举行
2023年4月20日,由乐聚(深圳)机器人技术有限公司牵头,苏州大学、哈尔滨工业大学、安徽乐聚服务机器人研究院等单位参与的“高动态仿人机器人”项目一期成果论证会在深圳顺利召开。

会议邀请到俄罗斯工程院外籍院士、苏州大学机电工程学院院长、乐聚机器人首席科学家孙立宁,苏州大学张艳华老师,哈尔滨工业大学查富生老师,苏州大学李伟达老师,燕山大学史亚鹏老师,同济大学何天然老师等机器人领域专家学者,共同见证项目研究新进展,探讨高动态仿人机器人技术发展新思路。
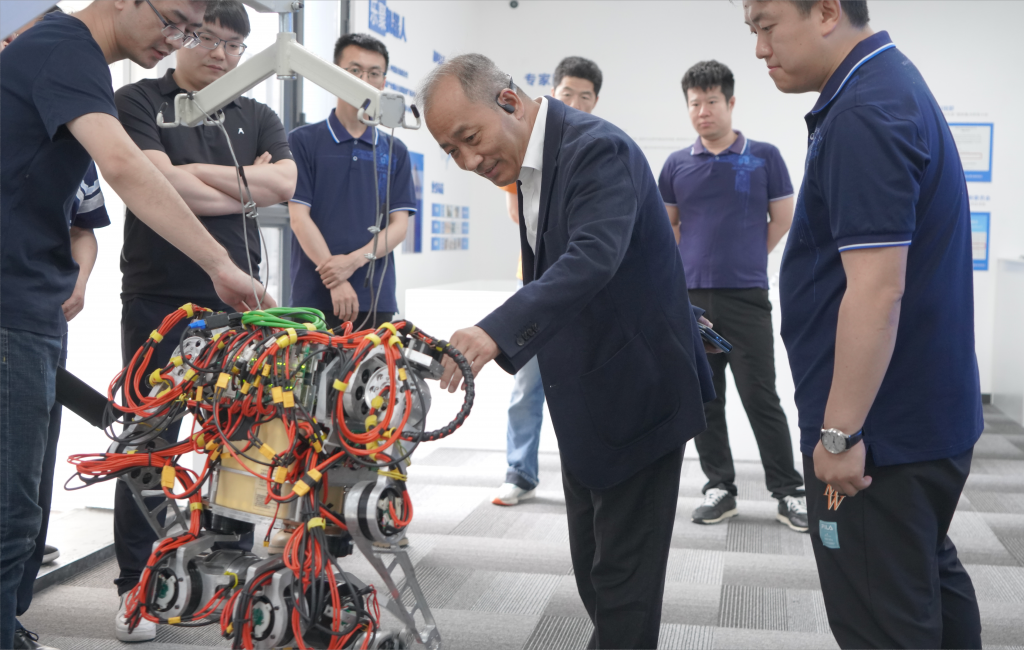
会前,孙院士一行观看了仿人机器人的高动态多模态行走、非结构地形抗扰控制等成果演示。
论证会上,乐聚机器人董事长冷晓琨就高动态仿人机器人项目进展情况、核心技术攻关、产品未来规划作了详细汇报,展示了团队在准直驱关节的仿人机器人系统、高性能驱动器等方面取得的系列研究成果。目前项目已经实现稳定的双足动态行走与鲁棒的抗扰动控制效果,后续将继续优化机器人高动态运动控制、轻量化结构设计、行走步态等方面的技术性能,预计今年下半年将在科研院所、高校等场景实现商业化落地。

同济大学何天然老师向与会专家具体介绍了高动态仿人机器人核心零部件的研究情况与规划,并就技术实现路径、研发难点及对应商业化路径进行了详细的汇报。

孙立宁院士对研发团队现阶段工作成果予以肯定,并对项目下一阶段研发工作提出指导建议。他表示,仿人机器人作为“机器人皇冠上的明珠”,将成为机器人领域的新一代标志性成果。当前,正值国家经济转型的关键节点,企业要积极响应国家《“十四五”机器人产业发展规划》,攻关仿人机器人关键技术。在仿人机器人的实际应用场景中,产学研三方要提炼出具体的科学问题,充分利用各方的协同创新优势,进行有组织科研。围绕牵头单位制定的技术路线,各方应并行合作,致力于解决机器人实际落地难题,推动机器人产业高质量发展,为抢占国际科技产业创新高地并为国家经济社会发展贡献技术力量。

参会专家学者结合前沿技术动态与丰富研究经验,就如何实现机器人高集成度、轻量化一体化、高动态特性等具体问题展开了深入探讨。未来将继续采取并行合作模式,自研统一化实验平台,以机器人本体结构设计、模块化关节、运动控制算法等关键技术为持续攻坚方向,为国产高动态仿人机器人技术发展和广泛应用提供强力支撑。

冷晓琨表示未来将积极推进仿人机器人与以ChatGPT为代表的新一代人工智能技术的深度融合,不断提升机器人动态运动、智能感知、人机交互、国产化机器人操作系统等方面的技术能力,加速仿人机器人在科研教育、家居服务、工业运维等多元场景的商业化落地,让“机器人+”渗透各个行业领域,为人类生产生活提供更多服务便利。
